Building Reliable Robotics for the Real World
> who_am_i.sh

I am a System Software Engineer at Laza Medical, where I build robotic and AI systems for healthcare. My work centers on medical robotics, with a focus on automating echocardiography imaging and improving the reliability of real-world clinical workflows.
I'm particularly interested in problems at the intersection of robotics and uncertainty, where systems must perform reliably despite imperfect data and environments.
When I'm not working on robotics, I'm usually outdoors or sketching on my iPad.
> current_work.sh
System Software Engineer
- -C++/Python control software for AI-powered echo probe automation
- -Sensor fusion (ultrasound + robot feedback) for anatomical tracking
- -Hardware-software integration + system validation
- -Contributing to deployment of a clinical robotic platform
> ./building_in_the_garage
it-moves-sometimes
Work in ProgressAn ongoing scratch-built robot project: custom CAD, 3D printed parts, embedded control, and ROS2 integration.
$ Pi is talking to Arduino
$ ROS2 sees the LiDAR
$ Wheel encoders publishing usable data
$ Very close to attempting SLAM...
> publications.bib
Learning Verifiable Control Policies Using Relaxed Verification
To provide safety guarantees for learning-based control systems, recent work has developed formal verification methods to apply after training ends. However, if the trained policy does not meet the specifications, or there is conservatism in the verification algorithm, establishing these guarantees may not be possible. Instead, this work proposes to perform verification throughout training to ultimately aim for policies whose properties can be evaluated throughout runtime with lightweight, relaxed verification algorithms.
Read Paper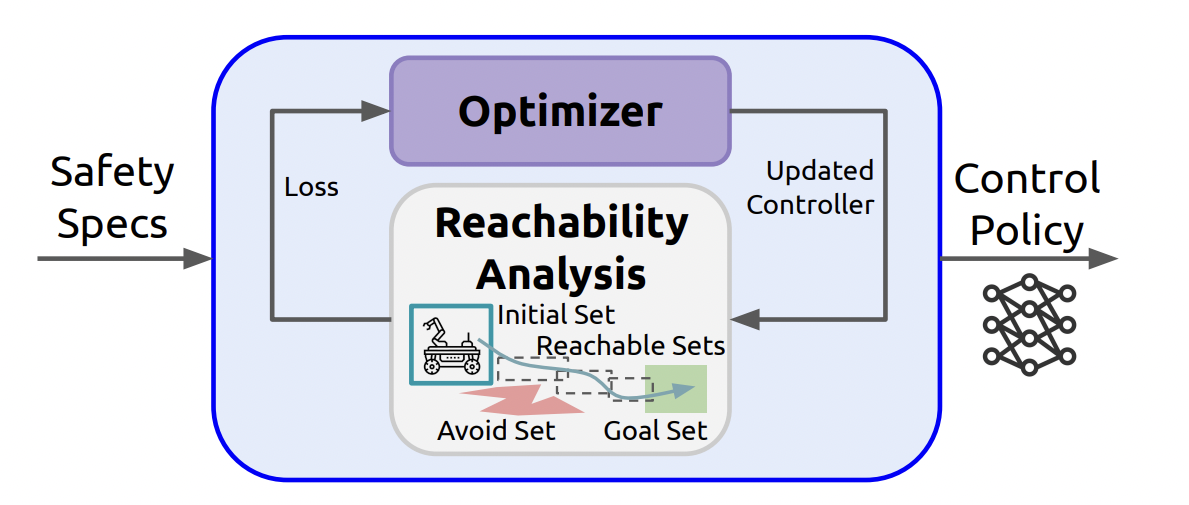
> latest_posts.md
View AllNobody's got the time, Docker.
Docker builds repeatedly download the same packages, wasting bandwidth and slowing build times. Using apt-cacher-ng as a local caching proxy solves this by downloading packages once and reusing them for all future installations.
Hey Alexa, When's My Train? The Ultimate MBTA Skill
Creating an Alexa skill to track Boston's public transit in real-time. This project combines voice technology with public transit APIs to solve the everyday problem of unpredictable train arrivals.
Understanding Linear Algebra for Machine Learning: A Comprehensive Guide
A deep dive into the fundamental linear algebra concepts essential for machine learning, covering vectors, matrices, eigenvalues, and their applications in ML algorithms.


